
Синхронный двигатель принцип. Синхронные двигатели. Принципы работы синхронного двигателя
Особенностью работы двигателя является равенство скорости вращения ротора и скорости вращения магнитного потока. Поэтому скорость вала двигателя не зависит и не изменяется от величины подключаемой нагрузки. Это достигается за счет того, что индуктор синхронного электродвигателя является электромагнитом, в некоторых случаях постоянным магнитом.
Разница между синхронным и асинхронным двигателями приведена ниже в табличной форме. Синхронный двигатель - это двигатель, который работает на синхронной скорости, то есть скорость ротора равна скорости вращения статора двигателя. Ротор асинхронного двигателя вращается со скоростью, меньшей, чем синхронная скорость, т.е.
Подробное объяснение разницы между синхронным и асинхронным двигателями приведено ниже
Синхронный двигатель - это машина, скорость вращения ротора и скорость магнитного поля статора равны. Асинхронный двигатель - это машина, ротор которой вращается со скоростью, меньшей, чем синхронная. Бесщеточный двигатель, двигатель с переменным сопротивлением, двигатель с синхронным двигателем с синхронным двигателем с синхронным двигателем и двигатель с гистерезисным двигателем. Кольцо скольжения и щетки необходимы в синхронном двигателе, тогда как асинхронный двигатель не требует кольца скольжения и щетки. Только абразивный двигатель с раневым типом требует как кольца скольжения, так и щетки. Синхронный двигатель стоит дорого по сравнению с асинхронным двигателем. Эффективность синхронного двигателя больше, чем асинхронный двигатель. Изменяя возбуждение, коэффициент мощности синхронного двигателя может быть соответствующим образом отрегулирован как запаздывающий, ведущий или единичный, тогда как асинхронный двигатель работает только с запаздывающим коэффициентом мощности. Ток подается на ротор синхронного двигателя. Ротор асинхронного двигателя не требует никакого тока. Скорость синхронного двигателя не зависит от изменения нагрузки. Скорость асинхронного двигателя уменьшается с увеличением нагрузки. Синхронный двигатель не запускается самостоятельно, тогда как асинхронный режим запускается самостоятельно. Изменение приложенного напряжения не влияет на крутящий момент синхронного двигателя, тогда как это влияет на крутящий момент асинхронного двигателя. Синхронный двигатель работает плавно и относительно хорошо на низкой скорости, что ниже 300 об / мин, тогда как скорость выше 600 об / мин. Асинхронный двигатель отлично работает. Асинхронные двигатели используются в центробежных насосах и вентиляторах, воздуходувках, бумажных и текстильных фабриках, компрессорах и лифтах. и т.д. различные применения синхронного двигателя состоят в том, что он используется на электростанциях, в обрабатывающих производствах и т.д. он также используется в качестве контроллера напряжения. Асинхронный двигатель не требует дополнительного источника запуска. . Крутящий момент вырабатывается электрическим током в роторе.
Количество пар полюсов ротора одинаково с числом пар полюсов у движущегося магнитного поля. Взаимное воздействие этих полюсов дает возможность выравнивания скорости ротора. На валу в этот момент может быть любая по величине нагрузка. Она не влияет на скорость вращения индуктора.
Конструктивные особенности и принцип работы
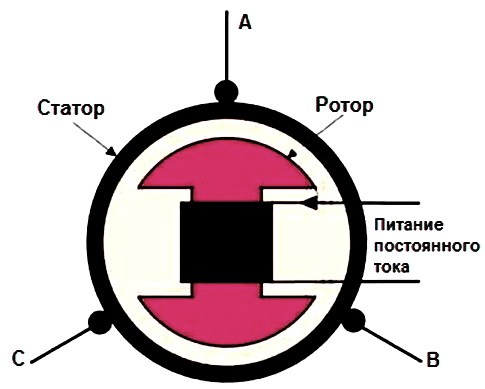
Основными составными частями синхронного электродвигателя являются: статор, который неподвижен, и ротор, иными словами называемый индуктором. Статор имеет другое название – якорь, но от этого его суть не меняется. Эти части двигателя разделены прослойкой воздуха. Между пазами заложена трехфазная обмотка, которая чаще всего имеет соединение по .
Электрический ток генерируется электромагнитной индукцией из магнитного поля обмоток статора. Для синхронных двигателей с постоянными магнитами требуется привод. Вы можете видеть, что в обоих случаях эффективность обоих типов двигателей снижается. Преимущества и недостатки двигателей с постоянным магнитом.
Хотя двигатели с постоянным магнитом имеют более высокую начальную стоимость, они могут предлагать меньший размер для более компактных механических пакетов и, что более важно, более высокую эффективность. Асинхронный двигатель обычно называют асинхронным двигателем. Оба типа сильно отличаются друг от друга. Основные различия между синхронным двигателем и асинхронным двигателем обсуждаются ниже.
Когда двигатель после запуска начал работать, токи якоря образуют движущееся магнитное поле, его вращение дает пересечение поля индуктора. В итоге такой работы двух полей возникает энергия. Магнитное поле статора по своей сути является полем его реакции. В работе генераторов такую энергию получают с помощью индукторов.
Основные свойства синхронных двигателей
Повороты статора вращаются с синхронной скоростью при подаче с трехфазным питанием. Если это сделать, полюса ротора будут магнитно соединены с вращающимися полюсами статора, и, таким образом, ротор начнет вращаться с синхронной скоростью. Синхронный двигатель всегда работает со скоростью, равной его синхронной скорости. то есть. Асинхронный двигатель всегда работает со скоростью, которая меньше, чем синхронная скорость. При запуске ротор должен вращаться со скоростью, близкой к синхронной. . Асинхронные двигатели являются наиболее широко используемыми электродвигателями из-за их надежности, низкой стоимости, прочности и надежности.
Полюсами являются электромагниты статора, работающие на постоянном токе. Статоры синхронных моторов могут выполняться по различным схемам: неявнополюсной, а также явнополюсной. Они отличаются положением полюсов.
Для снижения магнитного сопротивления и оптимизации условий прохода магнитного поля используют сердечники из ферромагнитного материала. Они находятся в роторе и якоре. Производятся они из электротехнической стали, которая содержит большое количество кремния. Это дает возможность снизить вихревые токи и увеличить электрическое сопротивление стали.
Однако асинхронные двигатели по своей природе не имеют возможности работы с переменной скоростью. По этой причине на большинстве электроприводов были применены ранее двигатели постоянного тока. Но последние разработки в методах управления скоростью асинхронного двигателя привели к их широкомасштабному использованию практически во всех электрических приводах.
Ключевые слова: асинхронный двигатель, управление скоростью, режим работы.
- Дийок, Океке, Учечи Аниагву.
- Американский журнал электротехники и электроники 2: 62.
- Различные методы управления скоростью трехфазного асинхронного двигателя.
- Американский журнал электротехники и электроники, 4, 62.
- Американский журнал электротехники и электроники 4, вып. 2: 62.
Синхронные электродвигатели имеют в своей основе принцип взаимодействия полюсов индуктора и статора. Во время пуска двигатель ускоряется до скорости вращения магнитного потока. Только при таком условии электродвигатель начинает действовать в синхронном режиме. При таком процессе магнитные поля образуют пересечение, возникает вход в синхронизацию.
Долгое время для разгона мотора применяли отдельный пусковой двигатель. Его соединяли механическим путем с синхронным мотором. При запуске ротор мотора ускорялся и достигал синхронной скорости. Далее мотор самостоятельно втягивался в синхронное движение. При выборе мощности пускового мотора руководствовались 15% мощности от номинала разгоняемого двигателя. Этого резерва мощности было достаточно для запуска синхронного двигателя, даже при наличии небольшой нагрузки.
Однофазные версии используются в небольших приборах. Их скорость определяется частотой тока питания, поэтому они наиболее широко используются в приложениях с постоянной скоростью, хотя версии с переменной скоростью с использованием частотно-регулируемых приводов становятся все более распространенными.
При изменении частоты подачи можно изменять синхронную скорость двигателя и, таким образом, контролировать крутящий момент трехфазного асинхронного двигателя. Синхронная скорость двигателя при номинальных условиях известна как базовая скорость. При использовании регулятора частоты вращения можно регулировать скорость двигателя выше или ниже базовой скорости. Увеличение частоты увеличивает отношение крутящего момента и уменьшение частоты уменьшает отношение момента вращения двигателя.
Такой метод разгона более сложный, значительно повышает стоимость оборудования. В современных конструкциях синхронные электродвигатели не имеют такой схемы разгона. Применяют другую систему разгона. Реостатом замыкают обмотки индуктора по аналогии с асинхронным двигателем. Для запуска на ротор монтируют короткозамкнутую обмотку, являющуюся также и успокоительной обмоткой, которая предотвращает раскачивание ротора при синхронизации.
Как видно из уравнения 12, крутящий момент, создаваемый асинхронным двигателем, изменяется как квадрат напряжения, приложенного к его клеммам статора. Таким образом, изменяя приложенное напряжение, электромагнитный крутящий момент, развиваемый двигателем, может меняться. Этот метод обычно используется для малых двигателей с короткозамкнутым ротором, где стоимость является важным критерием, а эффективность - нет. Однако этот метод имеет довольно ограниченный диапазон контроля скорости.
Контроль напряжения и частоты статора, т.е. Управление напряжением и частотой статора должно контролировать скорость и крутящий момент асинхронного двигателя путем изменения отношения напряжения к частоте. Когда низкое напряжение и низкая частота подаются на двигатель, максимальный крутящий момент уменьшается при пониженных скоростях. Если отношение напряжения к частоте поддерживается постоянным, этот метод позволяет асинхронному двигателю доставлять свой номинальный крутящий момент со скоростью до его номинальной скорости.
При достижении ротором номинальной скорости, к индуктору подключают постоянный ток. Однако, для пуска моторов с постоянными магнитами не обойтись без применения пусковых внешних двигателей.
В криогенных синхронных электродвигателях применяется обращенная конструкция. В ней якорь и индуктор размещены наоборот, индуктор находится на статоре, а якорь расположен на роторе. У таких машин возбуждающие обмотки состоят из сверхпроводимых материалов.
Что представляет собой синхронный двигатель?
Это потому что; поток воздушного зазора уменьшается из-за падения импеданса статора, а двигатель работает на низкой частоте. Основным фактором при определении скорости асинхронного двигателя является количество полюсов, заданное формулой. Синхронная скорость, в оборотах в минуту.
Из приведенной выше формулы, изменение полюса в индукционной машине может быть выполнено с использованием двигателя Дахландера, также известного как двигатель, изменяющий полюс. Количество полюсов статора может быть изменено несколькими обмотками статора, методом последовательных полюсов, амплитудной модуляцией полюсов.
Достоинства и недостатки
Синхронные двигатели имеют основное преимущество по сравнению с асинхронными моторами тот факт, что возбуждение от постоянного тока внешнего источника дает возможность работы при значительной величине коэффициента мощности. Эта особенность дает возможность увеличить значение коэффициента мощности для общей сети благодаря включению синхронного мотора.
Трехфазный источник питания обеспечивает вращающееся магнитное поле в асинхронном двигателе. В то время как ротор синхронного двигателя вращается с той же скоростью, что и поле статора, ротор асинхронного двигателя вращается с меньшей скоростью, чем поле статора. Поэтому магнитное поле статора асинхронного электродвигателя изменяется или вращается относительно ротора. Это вызывает противоположный ток в роторе асинхронного двигателя, по существу, вторичную обмотку двигателя, когда последняя короткозамкнута или закрыта через внешний импеданс.
Синхронные электродвигатели имеют и другие достоинства:
- Электродвигатели синхронного типа работают с повышенным коэффициентом мощности, что создает уменьшение расхода энергии и снижает потери. КПД синхронного мотора выше при той же мощности асинхронного двигателя.
- Синхронные электродвигатели имеют момент вращения, который прямо зависит от напряжения сети. Поэтому он при уменьшении напряжения сохраняет свою мощность больше асинхронного. Это является фактором надежности подобных конструкций моторов.
Недостатками являются следующие отрицательные моменты:
- При проведении сравнительного анализа конструкций двух моторов, можно отметить, что синхронные электродвигатели выполнены по более сложной схеме, поэтому их стоимость будет выше.
- Следующим недостатком для синхронных моторов стала необходимость в источнике тока в виде выпрямителя, либо другого блока питания постоянного тока.
- Запуск двигателя происходит по сложной схеме.
- Регулировка скорости вала двигателя возможна только одним способом, с помощью применения частотного преобразователя.
В итоге можно сказать, что все-таки преимущества синхронных двигателей перекрывают недостатки. Поэтому двигатели такого вида широко применяются в технологических процессах, где идет постоянный непрерывный процесс, и не требуется частая остановка и запуск оборудования: на мельничном производстве, в компрессорах, дробилках, насосах и так далее.
Вращающийся магнитный поток индуцирует токи в обмотках ротора аналогично токам, индуцированным вторичной обмоткой трансформатора. Токи в обмотках ротора в свою очередь создают магнитные поля в роторе, которые реагируют на поле статора. Из-за закона Ленца направление создаваемого магнитного поля будет таким, чтобы противостоять изменению тока через обмотки ротора. Причиной индуцированного тока в обмотках ротора является магнитное поле вращающегося статора, поэтому, чтобы противостоять изменению в роторных токах, ротор начнет вращаться в направлении магнитного поля вращающегося статора.
Выбор двигателя
К вопросу приобретения синхронного электродвигателя нужно подходить, основываясь на следующие факторы:
Условия эксплуатации электродвигателя. По условиям выбирают тип двигателя, который может быть защищенным, открытым или закрытым. А также моторы отличаются по защите токовых частей от влаги, температуры, агрессивных сред. Для взрывоопасного производства существуют специальные защиты, предотвращающие образование искр в двигателе.
Особенности выполнения подключения электродвигателя с потребителем.
Ротор разгоняется до тех пор, пока величина индуцированного тока и момента ротора не будет балансировать приложенную нагрузку. Поскольку вращение на синхронной скорости не приведет к индуцированному ротору ток, асинхронный двигатель всегда работает медленнее, чем синхронная скорость. Таким образом, работа асинхронного двигателя приводит к потерям и выходной мощности, как показано на рисунке 1 ниже.
Трехфазный асинхронный двигатель с фазным ротором
Рисунок 1. Схема электропитания трехфазного асинхронного двигателя. Эта кривая имеет следующие характерные особенности. Заштрихованная область показывает нормальный рабочий диапазон для действия двигателя. В этой области крутящий момент линейно возрастает со скольжением.
Синхронные компенсаторы
Они служат для компенсирования коэффициента мощности в электрической сети и стабилизации номинального значения напряжения в местах подключения нагрузок к двигателю. Нормальным режимом синхронного компенсатора является режим перевозбуждения в момент отдачи в электрическую сеть .
Такие компенсаторы еще называют генераторами реактивной мощности, так как они предназначены для выполнения такой же задачи, как батареи конденсаторов на подстанциях. Когда мощность нагрузок уменьшается, то часто необходимо действие синхронных компенсаторов в невозбужденном режиме при их потреблении реактивной мощности и индуктивного тока, потому что напряжение в сети старается увеличиться, а для его стабилизации на рабочем уровне нужно нагрузить сеть током индуктивности, который вызывает в сети снижение напряжения питания.
Синхронные электродвигатели имеют и другие достоинства
Это происходит со скоростью, близкой к скорости, но меньшей, чем синхронной. Если крутящий момент нагрузки больше, чем этот крутящий момент, двигатель остановится. Максимальный крутящий момент происходит при низком значении скольжения. Это типично для всех асинхронных двигателей и является желательной особенностью, поскольку изменение скорости с нагрузкой невелико, что делает ее почти двигателем с постоянной скоростью.
Какой агрегат лучше
Значение скольжения больше 1 также показано на рисунке. Чтобы достичь значения скольжения более 1, ротор должен быть соединен с первичным двигателем, приводимым в движение в направлении, противоположном направлению вращения поля статора, причем статор все еще подключен к трехфазное питание. В этой области двигатель получает как электрический, так и механический вход, причем вся мощность рассеивается как потеря. Этот режим работы известен как тормозное действие.
Для таких целей синхронные компенсаторы обеспечиваются регулятором автоматического возбуждения. Регулятор изменяет ток возбуждения таким образом, что напряжение на компенсаторе не изменяется.
Сфера применения
Широкое использование электродвигателей асинхронного типа со значительными недогрузками делает работу станций и энергосистем сложнее, так как уменьшается коэффициент мощности системы, это ведет к незапланированным потерям, к их неполному использованию по активной мощности. В связи с этим появилась необходимость в использовании двигателей синхронного типа, особенно для приводов механизмов значительной мощности.
Если сравнивать синхронные электродвигатели с асинхронными, то достоинством синхронных стала их работа коэффициентом мощности равном 1, благодаря действию возбуждения постоянным током. При этом они не расходуют реактивную мощность из питающей сети, а если работают с перевозбуждением, то даже отдают некоторую величину реактивной мощности для сети.
В итоге коэффициент мощности сети улучшается, и снижаются потери напряжения, увеличивается коэффициент мощности генераторов электростанций. Наибольший момент синхронного электродвигателя прямо зависит от напряжения, а у синхронного электромотора – от квадрата напряжения.
Поэтому, при уменьшении напряжения синхронный электромотор имеет по-прежнему значительную нагрузочную способность. Также, применение возможности повышения возбуждающего тока синхронных моторов дает возможность повышать их надежность эксплуатации при внезапных снижениях напряжения, и оптимизировать в таких случаях работу всей энергосистемы.
Из-за большой величины воздушного промежутка дополнительные потери в стальных сердечниках и в роторе синхронных моторов меньше, чем у двигателей асинхронного вида. Поэтому КПД синхронных моторов чаще бывает больше.
Однако устройство синхронных моторов намного сложнее, а также необходим возбудитель или другое устройство питания возбуждения. Поэтому синхронные моторы имеют более высокую стоимость по сравнению с асинхронными с короткозамкнутым ротором.
Запуск и регулировка скорости у синхронных электродвигателей имеет свои сложности. Но при больших мощностях их преимущества превосходят недостатки. Поэтому они применяются во многих местах, где не нужны частые пуски, остановки оборудования, а также нет необходимости в регулировки оборотов двигателя с приводом механизмов насосов, компрессоров, мельниц и т.д.
В данной статье рассмотрим принципиальные отличия синхронных электродвигателей от асинхронных, чтобы каждый читающий эти строки мог бы эти различия четко понимать.
Асинхронные электродвигатели более широко распространены сегодня, однако в некоторых ситуациях синхронные двигатели оказываются более подходящими, более эффективными для решения конкретных промышленных и производственных задач, об этом будет рассказано далее.
Прежде всего давайте вспомним, что же вообще такое электродвигатель. называется электрическая машина, предназначенная для преобразования электрической энергии в механическую энергию вращения ротора, и служащая в качестве привода для какого-нибудь механизма, например для приведения в действие подъемного крана или насоса.
Еще в школе всем рассказывали и показывали, как два магнита отталкиваются одноименными полюсами, а разноименными - притягиваются. Это . Но существуют и переменные магниты. Каждый помнит рисунок с проводящей рамкой, расположенной между полюсами подковообразного постоянного магнита.
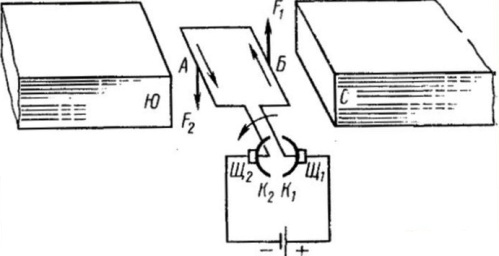
Горизонтально расположенная рамка, если по ней пустить постоянный ток, станет поворачиваться в магнитном поле постоянного магнита под действием пары сил (Сила Ампера), пока не будет достигнуто равновесие в вертикальном положении.
Если затем по рамке пустить постоянный ток противоположного направления, то рамка повернется дальше. В результате такого попеременного питания рамки постоянным током то одного, то другого направления, достигается непрерывное вращение рамки. Рамка здесь представляет собой аналог переменного магнита.
Приведенный пример с вращающейся рамкой в простейшей форме демонстрирует принцип работы синхронного электродвигателя. У любого синхронного электродвигателя на роторе есть обмотки возбуждения, на которые подается постоянный ток, формирующий магнитное поле ротора. Статор же синхронного электродвигателя содержит обмотку статора, для формирования магнитного поля статора.
При подаче на обмотку статора переменного тока, ротор придет во вращение с частотой, соответствующей частоте тока в обмотке статора. Частота вращения ротора будет синхронна частоте тока обмотки статора, поэтому такой электродвигатель называется синхронным. Магнитное поле ротора создается током, а не индуцируется полем статора, поэтому синхронный двигатель способен держать синхронные номинальные обороты независимо от мощности нагрузки, разумеется, в разумных пределах.
Асинхронный электродвигатель в свою очередь отличается от синхронного. Если вспомнить рисунок в рамкой, и рамку просто накоротко замкнуть, то при вращении магнита вокруг рамки, индуцируемый в рамке ток создаст магнитное поле рамки, и рамка будет стремиться догнать магнит.
Частота вращения рамки под механической нагрузкой будет всегда меньше частоты вращения магнита, и частота не будет поэтому синхронной. Этот простой пример демонстрирует принцип действия асинхронного электродвигателя.
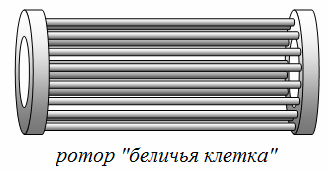
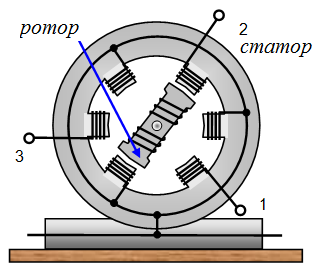
В асинхронном электродвигателе вращающееся магнитное поле формируется переменным током обмотки статора, расположенной в его пазах. Ротор типичного асинхронного двигателя обмоток как таковых не имеет, вместо этого на нем расположены накоротко соединенные стержни (ротор типа «беличья клетка»), такой ротор называется короткозамкнутым ротором. Бывают еще асинхронные двигатели с фазным ротором, там ротор содержит обмотки, сопротивление и ток в которых можно регулировать реостатом.

Итак, в чем же принципиальное отличие асинхронного электродвигателя от синхронного? С виду внешне они похожи, порой даже специалист не отличит по внешним признакам синхронный электродвигатель от асинхронного. Главное же отличие заключается в устройстве роторов. Ротор асинхронного электродвигателя не питается током, а полюса на нем индуцирутся магнитным полем статора.
Ротор синхронного двигателя имеет обмотку возбуждения с независимым питанием. Статоры синхронного и асинхронного двигателя устроены одинаково, функция в каждом случае одна и та же - создание вращающегося магнитного поля статора.
Обороты асинхронного двигателя под нагрузкой всегда на величину скольжения отстают от вращения магнитного поля статора, в то время как обороты синхронного двигателя равны по частоте «оборотам» магнитного поля статора, поэтому если обороты должны быть постоянными при различных нагрузках, предпочтительней выбирать синхронный двигатель, например в приводе гильотинных ножниц лучше всего справится со своей задачей мощный синхронный двигатель.

Область применения асинхронных двигателей сегодня очень широка. Это всевозможные станки, транспортеры, вентиляторы, насосы, - все то оборудование, где нагрузка сравнительно стабильна, или снижение оборотов под нагрузкой не критично для рабочего процесса.
Некоторые компрессоры и насосы требуют постоянной частоты вращения при любой нагрузке, на такое оборудование ставят синхронные электродвигатели.
Синхронные двигатели дороже в производстве, чем асинхронные, поэтому если есть возможность выбора и небольшое снижение оборотов под нагрузкой не критично, приобретают асинхронный двигатель.