
Понятие механической характеристики двигателя и механизма. Характеристики двигателей смешанного возбуждения
Лекция 7.
2.5. Механические характеристики двигателя постоянного тока с последовательным возбуждением. Двигательный режим
Схема включения двигателя приведена на рис. 2.8. Якорь двигателя М и обмотка возбуждения LM включены последовательно и получают питание от одного источника U. Поэтому ток якоря I я является и током возбуждения I в . Это обстоятельство определяет единственное отличие в конструкции двигателя с последовательным возбуждением от двигателя с независимым возбуждением: обмотка возбуждения LM ДПТ с последовательным возбуждением выполнена проводником того же сечения, что и обмотка якоря.
Рис. 2.8. Схема включения ДПТ с последовательным возбуждением.
При вращающемся якоре в его обмотке наводится э.д.с. вращения ^ Е . На схеме включения двигателя направление Е встречно по отношению направления U , что соответствует двигательному режиму работы. Величина Е равна:
Где ?
– угловая скорость двигателя; Ф
– поток двигателя;  - конструктивный коэффициент двигателя данные для расчета, которого приводятся в справочниках. Здесь р
– число пар полюсов двигателя; N
– число активных проводников обмотки якоря; а
– число пар параллельных ветвей обмотки якоря.
- конструктивный коэффициент двигателя данные для расчета, которого приводятся в справочниках. Здесь р
– число пар полюсов двигателя; N
– число активных проводников обмотки якоря; а
– число пар параллельных ветвей обмотки якоря.
Направление якорного тока I Я , как и направление Е на схеме включения показано для двигательного режима работы.
Допустимое значение якорного тока двигателя I я доп ограничивается условиями коммутации и механической прочностью якоря и не должно превышать номинальный ток I ян более чем в 2,5 раза I я доп ? 2,5 I ян .
В соответствии с уравнением равновесия напряжений при установившемся режиме работы двигателя напряжение U, приложенное к якорной цепи двигателя уравновешивается падением напряжения в якорной цепи I я R яц и наведенной в обмотке якоря э.д.с. вращения Е :
U= I Я R ЯЦ + Е
Где R ЯЦ =R Я +R ДП +R КО +R В +R П – суммарное сопротивление якорной цепи. Здесь R Я - сопротивление обмотки якоря; R ДП – сопротивление обмотки дополнительных полюсов; R КО – сопротивление компенсационной обмотки; R В – сопротивление обмотки возбуждения; R П – сопротивление пускового реостата.
Величина I Я в установившемся режиме будет равна:
В режиме пуска ^ Е=0 , поэтому из-за небольшого сопротивления обмоток пусковой ток I Я П может превышать допустимое значение. Для ограничения пускового тока служит пусковой реостат, сопротивление которого R П выбирается таким образом, чтобы I Я П ? I Я ДОП
Из уравнения равновесия напряжений для якорной цепи можно получить аналитическое выражение для механической характеристики двигателя.
Подставив в него вместо э.д.с. вращения ^ Е ее значение и решив полученное уравнение относительно скорости, получим зависимость скорости двигателя ? от тока якоря I Я ?=f(I Я ) , которая называется электромеханической характеристикой:
Поскольку обмотка возбуждения включена последовательно с якорем двигателя, создаваемый ею магнитный поток ^ Ф является функцией тока якоря I Я . Зависимость Ф= f(I Я ) называется кривой намагничивания и носит нелинейный характер типа «зона насыщения». Точного аналитического описания этой кривой не существует, поэтому нет и точного аналитического описания механической характеристики ДПТ с последовательным возбуждением. Если, пренебрегая насыщением магнитной системы, предположить линейную зависимость между Ф и I Я с коэффициентом пропорциональности?, то есть считать Ф=?I Я , то вращающий момент будет равен:
М=kФI Я =k?I Я 2
Отсюда величина тока якоря будет равна:
Подставив в уравнение электромеханической характеристики значение для I я , получим уравнение механической характеристики:
Где А=U/k?; В= R ЯЦ /(k?) – постоянные величины.
Анализ полученного уравнения показывает, что ось ординат является асимптотой для кривой и что в области малых значений моментов она имеет большую крутизну
При R П =0 и U=U н двигатель работает на естественной характеристике. Для построения естественной характеристики используются так называемые универсальные характеристики, приводимые в каталогах для каждой серии двигателей. Они представляют зависимости n=f(I Я ) и М= f(I Я ) в относительных единицах. Зная номинальные данные двигателя, можно построить его характеристику в абсолютных величинах. Такая характеристика приведена на рис. 2.9.
Рис. 2.9. Механические характеристики двигателя постоянного тока последовательного возбуждения.
Особенностью характеристики является резкое увеличение скорости при уменьшении момента сопротивления М
с
. По этому двигатель постоянного тока с последовательным возбуждением нельзя запускать в тех случаях, когда М
с
н
, так как скорость двигателя может превышать допустимое значение ?
доп
=2,5 ?
н
. Пояснить эту особенность можно, рассмотрев процессы, протекающие в двигателе при уменьшении нагрузки. Допустим, что двигатель работал в точке А на естественной характеристике (см. рис. 2.9.) в установившемся режиме со скоростью ?
1
. При уменьшении момента сопротивления от величины М
с1
например, до величины М
с2
, появляется положительный динамический момент М
Д
>0
и скорость двигателя начинает увеличиваться. При независимом возбуждении следствием этого будет увеличение э.д.с. вращения  и уменьшение тока якоря
и уменьшение тока якоря  и вращающего момента
и вращающего момента  . Увеличение скорости и уменьшение момента двигателя будет продолжаться до тех пор, пока момент двигателя М
на станет равным М
с2
и М
Д
станет равным нулю.
. Увеличение скорости и уменьшение момента двигателя будет продолжаться до тех пор, пока момент двигателя М
на станет равным М
с2
и М
Д
станет равным нулю.
При последовательном возбуждении э.д.с. вращения Е оказывается функцией двух величин – увеличивающейся скорости ? и уменьшающегося потока Ф . В результате этого величина Е , а значит и величины I Я и М , с ростом скорости существенно изменятся не будет, что приводит к сохранению М Д >0 и дальнейшему росту скорости. Если сопротивление пускового реостата R П >0 , то статическое падение скорости ?? с при одном и том же моменте двигателя будет больше, чем на естественной характеристике. Поэтому реостатные характеристики будут иметь большой наклон к оси абсцисс.
При последовательном возбуждении вращающий момент пропорционален квадрату тока якоря  и ограничение пускового тока значением I
Я ДОП
?2,5I
ЯН
позволяет получить гораздо больше чем при независимом возбуждении значение М
ДОП
=5 М
Н
. Коэффициент перегрузки двигателя постоянного тока с последовательным возбуждением по моменту
и ограничение пускового тока значением I
Я ДОП
?2,5I
ЯН
позволяет получить гораздо больше чем при независимом возбуждении значение М
ДОП
=5 М
Н
. Коэффициент перегрузки двигателя постоянного тока с последовательным возбуждением по моменту
K П = М ДОП /М Н равен пяти. Такой перегрузочной способностью не обладает больше не один электрический двигатель. Именно благодаря этому свойству двигатели с последовательным возбуждением используются в электрическом транспорте и подъемных механизмах.
Лекция 8.
^ 2.6. Механические характеристики двигателя постоянного тока с последовательным возбуждением. Режим электрического торможения.
Возможны два режима электрического торможения: динамическое торможение и торможение противовключением. Рекуперативное торможение осуществить не возможно, так как э.д.с. вращения Е не может быть больше напряжения якорного источника U .
^ Динамическое торможение осуществляется двумя способами: с самовозбуждением и с независимым возбуждением. Схема включения двигателя и механические характеристики для первого случая приведены на рис. 2.10.
Рис. 2.10. а) схема включения двигателя в режиме динамического торможения с самовозбуждением;
Б) характеристики двигателя в режиме динамического торможения с самовозбуждением.
Двигатель отключен от напряжения источника, а обмотка возбуждения переключена таким образом, чтобы направление тока I В в ней было таким же как а в двигательном режиме (см. рис. 2.8). Это сохранение направления тока исключает уничтожение малого остаточного потока, связанного с намагничиванием статора двигателя. Этот поток и является причиной самовозбуждения: в обмотке якоря, вращающегося под действием инерционных сил в прежнем направлении, наводится э.д.с. Е , направление которой такое же, как и в двигательном режиме. Под действием Е в контуре динамического торможения появляется ток, что приводит к увеличению потока Ф, э.д.с. Е и тока I Я . Поскольку ток I Я по отношению к двигательному режиму имеет противоположное направление, момент двигателя становится тормозным. Двигатель из точки А в первом квадранте переходит в точку В или С на характеристике динамического торможения во втором квадранте. Вначале процесс самовозбуждения проходит очень интенсивно и это приводит к броску тормозного момента, способного вызвать удары в механической части привода. Поэтому чаще применяют динамическое торможение с независимым возбуждением. Схема включения двигателя и механические характеристики приведены на рис. 2.11.
Рис. 2.11. а) схема включения двигателя в режиме динамического
Торможения с независимым возбуждением;
Б) характеристики двигателя в режиме динамического
Торможения с независимым возбуждением.
Зажимы якоря двигателя закорачиваются на сопротивление динамического торможения R ДТ , а обмотка возбуждения подключается к напряжению источника через сопротивление R В . Ток в ней направлен как и в двигательном режиме и устанавливается равным номинальному. Характеристики аналогичны характеристикам ДПТ с независимым возбуждением: они линейны, расположены во втором квадранте и проходят через начало координат.
^ Торможение противоключением , как и для ДПТ с независимым возбуждением, осуществляется в том случае, когда обмотки двигателя включены для одного направления вращения, а якорь двигателя под воздействием сил инерции или активного момента сопротивления вращается в противоположную сторону – против включения.
Реверсивная схема включения ДПТ с последовательным возбуждением приведена на рис. 2.12.
![]()
Рис. 2.12. Реверсивная схема включения ДПТ с последовательным возбуждением.
Назначение элементов такое же, как и на схеме рис. 2.5. При реверсе двигателя со стороны якоря направление тока в обмотке возбуждения LM сохраняется. Поэтому все процессы при торможении аналогичны происходящим в схеме рис. 2.5. Характеристики двигателя приведены на рис. 2.13.
Рис. 2.13.а) характеристики ДПТ с последовательным возбуждением в режиме торможения противоквлючением.
Б) аналогичные характеристики при активном М с.
Лекция 9.
^ 2.7. Механические характеристики асинхронных двигателей. Двигательный режим.
Асинхронные двигатели (АД) – самый распространенный вид двигателей, т.к. они более просты и надежны в эксплуатации, при равной мощности имеют меньшую массу, габариты и стоимость в сравнении с ДПТ. Схемы включения АД приведены на рис. 2.14.
До недавнего времени АД с короткозамкнутым ротором применялись в нерегулируемых электроприводах. Однако с появлением тиристорных преобразователей частоты (ТПЧ) напряжения, питающего статорные обмотки АД, двигатели с короткозамкнутым ротором начали использоваться в регулируемых электроприводах. В настоящее время в преобразователях частоты применяются силовые транзисторы и программируемые контроллеры. Способ регулирования скорости получил название импульсного и его совершенствование является важнейшим направлением в развитии электропривода.
Рис. 2.14. а) схема включения АД с короткозамкнутым ротором;
Б) схема включения АД с фазным ротором.
Уравнение для механической характеристики АД может быть получено на основании схемы замещения АД. Если в этой схеме пренебречь активным сопротивлением статора, то выражение для механической характеристики будет иметь вид:
 ,
,
Где  ;
;  .
.
Здесь М к – критический момент; S к - соответствующее ему критическое скольжение; U ф – действующее значение фазного напряжения сети; ? 0 =2?f/p – угловая скорость вращающегося магнитного поля АД (синхронная скорость); f – частота питающего напряжения; p – число пар полюсов АД; х к – индуктивное фазное сопротивление короткого замыкания (определяется из схемы замещения); S=(? 0 -?)/? 0 – скольжение (скорость ротора относительно скорости вращающегося поля); R 2 1 – суммарное активное сопротивление фазы ротора.
Механическая характеристика АД с короткозамкнутым ротором приведена на рис. 2.15.
Рис. 2.15. Механическая характеристика АД с короткозамкнутым ротором.
На ней можно выделить три характерные точки. Координаты первой точки (S=0; ?=? 0 ; М=0 ). Она соответствует режиму идеального холостого хода, когда скорость ротора равна скорости вращающегося магнитного поля. Координаты второй точки (S=S к ; М=М к ). Двигатель работает с максимальным моментом. При М с >М к ротор двигателя будет принудительно остановлен, что для двигателя является режимом короткого замыкания. Поэтому вращающий момент двигателя в этой точке и называется критическим М к . Координаты третьей точки (S=1; ?=0; М=М п ). В этой точке двигатель работает в режиме пуска: скорость ротора?=0 и на неподвижный ротор действует пусковой момент М п . Участок механической характеристики, расположенный между первой и второй характерными точками, называется рабочим участком. На нем двигатель работает в установившемся режиме. У АД с короткозамкнутым ротором при выполнении условий U=U н и f=f н механическая характеристика называется естественной. В этом случае на рабочем участке характеристики расположена точка, соответствующая номинальному режиму работы двигателя и имеющая координаты (S н ; ? н ; М н ).
Электромеханическая характеристика АД ?=f(I ф ) , которая на рис.2.15 изображена штриховой линией, в отличие от электромеханической характеристики ДПТ, совпадает с механической характеристикой только на ее рабочем участке. Это объясняется тем, во время пуска из-за изменяющейся частоты э.д.с. в обмотке ротора Е 2 изменяется частота тока и соотношение индуктивного и активного сопротивлений обмотки: в начале пуска частота тока большая и индуктивное сопротивление больше активного; с увеличением скорости вращения ротора ? частота тока ротора, а значит и индуктивное сопротивление его обмотки, уменьшается. Поэтому пусковой ток АД в режиме прямого пуска в 5ч7 раз превышает номинальное значение I фн , а пусковой момент М п равен номинальному М н . В отличии от ДПТ, где при пуске необходимо ограничивать пусковой ток и пусковой момент, при пуске АД пусковой ток необходимо ограничивать, а пусковой момент увеличивать. Последнее обстоятельство наиболее важно, поскольку ДПТ с независимым возбуждением запускается при М с н , ДПТ с последовательным возбуждением при М с н , а АД при работе на естественной характеристике при М с н .
У АД с короткозамкнутым ротором увеличение М п обеспечивается специальной конструкцией обмотки ротора. Паз для обмотки ротора делают глубоким, а саму обмотку располагают в два слоя. При пуске двигателя частота Е 2 и токи ротора большие, что приводит к появлению эффекта вытеснения тока – ток протекает только в верхнем слое обмотки. Поэтому увеличивается сопротивление обмотки и пусковой момент двигателя М П . Его величина может достигать 1,5М н .
У АД с фазным ротором увеличение М П обеспечивается за счет изменения его механической характеристики. Если сопротивление R П , включенное в цепь протекания тока ротора, равно нулю – двигатель работает на естественной характеристике и М П =М Н . При R П >0 увеличивается суммарное активное сопротивление фазы ротора R 2 1 . Критическое же скольжение S к по мере увеличения R 2 1 тоже увеличивается. Вследствие этого у АД с фазным ротором введение R П в цепь протекания тока ротора приводит к смещению М К в сторону больших скольжений. При S К =1 М П =М К . Механические характеристики АД с фазным ротором при R П >0 называются искусственными или реостатными. Они приведены на рис. 2.16.
Рис. 2.16. Механические характеристики АД с фазным ротором.
Асинхронный двигатель с короткозамкнутым ротором запустится при М п >М с и будет работать в точке А (см. рис. 2.15). После этого момент сопротивления М с можно увеличивать до М К . АД, как и двигатели постоянного тока, при увеличении М с будет автоматически, без вмешательства извне, снижать скорость ? и увеличивать вращающий момент М до тех пор, пока М и М с не сравняются по величине, т.е. из установившегося режима с большей скоростью переходить в установившийся режим с меньшей скоростью. При уменьшении М с будет наблюдаться обратное – двигатель из установившегося режима с меньшей скоростью будет автоматически переходить в установившийся режим с большей скоростью. Рабочий участок механической характеристики АД аналогичен механической характеристике ДПТ с независимым возбуждением – прямая линия, наклоненная к оси абсцисс.
Такими свойствами АД обладает благодаря э.д.с. Е 2 , которая наводится вращающимся магнитным полем статора в обмотке ротора. При М с >М динамический момент М д и скорость ротора ? уменьшается. Магнитное поле статора, вращающееся с постоянной скоростью ? 0 (синхронной скоростью) будет пересекать обмотку ротора с большой частотой. Поэтому будет увеличиваться Е 2 , ток в обмотке ротора, сила Ампера, действующая на ее витки, а значит и вращающий момент М .
Перегрузочная способность АД по моменту определяется отношением критического момента М К к моменту номинальному М Н . Для обычных АД с короткозамкнутым ротором М К /М Н =1,7 , с фазным ротором М К /М Н =1,8 . Для специальных крановых АД с короткозамкнутым ротором типа МТК и фазным ротором типа МТКФ отношение М К /М Н =2,3ч3,4 .
38) Механическая характеристика асинхронного двигателя.
Механическая характеристика . Зависимость частоты вращения ротора от нагрузки (вращающегося момента на валу) называется механической характеристикой асинхронного двигателя (рис. 262, а). При номинальной нагрузке частота вращения для различных двигателей обычно составляет 98-92,5 % частоты вращения n 1 (скольжение s ном = 2 – 7,5 %). Чем больше нагрузка, т. е. вращающий момент, который должен развивать двигатель, тем меньше частота вращения ротора. Как показывает кривая
Рис. 262. Механические характеристики асинхронного двигателя: а - естественная; б - при включении пускового реостата
на рис. 262, а, частота вращения асинхронного двигателя лишь незначительно снижается при увеличении нагрузки в диапазоне от нуля до наибольшего ее значения. Поэтому говорят, что такой двигатель обладает жесткой механической характеристикой.
Наибольший вращающий момент M max двигатель развивает при некоторое скольжении s kp , составляющем 10-20%. Отношение M max /M ном определяет перегрузочную способность двигателя, а отношение М п /М ном - его пусковые свойства.
Двигатель может устойчиво работать только при обеспечении саморегулирования, т. е. автоматическом установлении равновесия между приложенным к валу моментом нагрузки М вн и моментом М, развиваемым двигателем. Этому условию соответствует верхняя часть характеристики до достижения M max (до точки В). Если нагрузочный момент М вн превысит момент M max , то двигатель теряет устойчивость и останавливается, при этом по обмоткам машины будет длительно проходить ток в 5-7 раз больше номинального, и они могут сгореть.
При включении в цепь обмоток ротора пускового реостата получаем семейство механических характеристик (рис. 262,б). Характеристика 1 при работе двигателя без пускового реостата называется естественной. Характеристики 2, 3 и 4, получаемые при подключении к обмотке ротора двигателя реостата с сопротивлениями R 1п (кривая 2), R 2п (кривая 3) и R 3п (кривая 4), называют реостатными механическими характеристиками. При включении пускового реостата механическая характеристика становится более мягкой (более крутопадающей), так как увеличивается активное сопротивление цепи ротора R 2 и возрастает s кp . При этом уменьшается пусковой ток. Пусковой момент М п также зависит от R 2 . Можно так подобрать сопротивление реостата, чтобы пусковой момент М п был равен наибольшему М max .
В двигателе с повышенным пусковым моментом естественная механическая характеристика приближается по своей форме к характеристике двигателя с включенным пусковым реостатом. Вращающий момент двигателя с двойной беличьей клеткой равен сумме двух моментов, создаваемых рабочей и пусковой клетками. Поэтому характеристику 1 (рис. 263) можно получить путем суммирования характеристик 2 и 3, создаваемых этими клетками. Пусковой момент М п такого двигателя значительно больше, чем момент М’ п обычного короткозамкнутого двигателя. Механическая характеристика двигателя с глубокими пазами такая же, как и у двигателя с двойной беличьей клеткой.
НА ВСЯКИЙ СЛУЧАЙ РАБОЧУЮ ХАРАКТЕРИСТИКУ!!!
Рабочие характеристики. Рабочими характеристиками асинхронного двигателя называются зависимости частоты вращения n (или скольжения s), момента на валу М 2 , тока статора I 1 коэффициента полезного действия? и cos? 1 , от полезной мощности Р 2 = Р mx при номинальных значениях напряжения U 1 и частоты f 1 (рис. 264). Они строятся только для зоны практической устойчивой работы двигателя, т. е. от скольжения, равного нулю, до скольжения, превышающего номинальное на 10-20%. Частота вращения n с ростом отдаваемой мощности Р 2 изменяется мало, так же как и в механической характеристике; вращающий момент на валу М 2 пропорционален мощности Р 2 , он меньше электромагнитного момента М на значение тормозящего момента М тр, создаваемого силами трения.
Ток статора I 1 , возрастает с увеличением отдаваемой мощности, но при Р 2 = 0 имеется некоторый ток холостого хода I 0 . К. п. д. изменяется примерно так же, как и в трансформаторе, сохраняя достаточно большое значение в сравнительно широком диапазоне нагрузки.
Наибольшее значение к. п. д. для асинхронных двигателей средней и большой мощности составляет 0,75-0,95 (машины большой мощности имеют соответственно больший к. п. д.). Коэффициент мощности cos? 1 асинхронных двигателей средней и большой мощности при полной нагрузке равен 0,7-0,9. Следовательно, они загружают электрические станции и сети значительными реактивными токами (от 70 до 40% номинального тока), что является существенным недостатком этих двигателей.
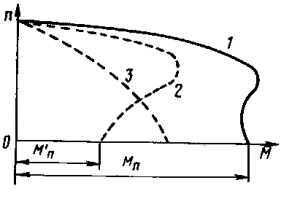 Рис.
263. Механическая характеристика
асинхронного двигателя с повышенным
пусковым моментом (с двойной беличьей
клеткой)
Рис.
263. Механическая характеристика
асинхронного двигателя с повышенным
пусковым моментом (с двойной беличьей
клеткой)
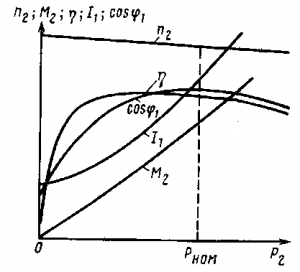 Рис.
264. Рабочие характеристики асинхронного
двигателя
Рис.
264. Рабочие характеристики асинхронного
двигателя
При нагрузках 25-50 % номинальной, которые часто встречаются при эксплуатации различных механизмов, коэффициент мощности уменьшается до неудовлетворительных с энергетической точки зрения значений (0,5-0,75).
При снятии нагрузки с двигателя коэффициент мощности уменьшается до значений 0,25-0,3, поэтому нельзя допускать работу асинхронных двигателей при холостом ходе и значительных недогрузках.
Работа при пониженном напряжении и обрыве одной из фаз. Понижение напряжения сети не оказывает существенного влияния на частоту вращения ротора асинхронного двигателя. Однако в этом случае сильно уменьшается наибольший вращающий момент, который может развить асинхронный двигатель (при понижении напряжения на 30% он уменьшается примерно в 2 раза). Поэтому при значительном падении напряжения двигатель может остановиться, а при низком напряжении - не включиться в работу.
На э. п. с. переменного тока при уменьшении напряжения в контактной сети соответственно уменьшается и напряжение в трехфазной сети, от которой питаются асинхронные двигатели, приводящие во вращение вспомогательные машины (вентиляторы, компрессоры, насосы). Для того чтобы обеспечить нормальную работу асинхронных двигателей при пониженном напряжении (они должны нормально работать при уменьшении напряжения до 0,75U ном), мощность всех двигателей вспомогательных машин на э. п. с. берется примерно в 1,5-1,6 раза большей, чем это необходимо для привода их при номинальном напряжении. Такой запас по мощности необходим также из-за некоторой несимметрии фазных напряжений, так как на э. п. с. асинхронные двигатели питаются не от трехфазного генератора, а от расщепителя фаз. При несимметрии напряжений фазные токи двигателя будут неодинаковы и сдвиг между ними по фазе не будет равен 120°. В результате по одной из фаз будет протекать больший ток, вызывающий увеличенный нагрев обмоток данной фазы. Это заставляет ограничивать нагрузку двигателя по сравнению с работой его при симметричном напряжении. Кроме того, при несимметрии напряжений возникает не круговое, а эллиптическое вращающееся магнитное поле и несколько изменяется форма механической характеристики двигателя. При этом уменьшаются его наибольший и пусковой моменты. Несимметрию напряжений характеризуют коэффициентом несимметрии, который равен среднему относительному (в процентах) отклонению напряжений в отдельных фазах от среднего (симметричного) напряжения. Систему трехфазных напряжений принято считать практически симметричной, если этот коэффициент меньше 5 %.
При обрыве одной из фаз двигатель продолжает работать, но по неповрежденным фазам будут протекать повышенные токи, вызывающие увеличенный нагрев обмоток; такой режим не должен допускаться. Пуск двигателя с оборванной фазой невозможен, так как при этом не создается вращающееся магнитное поле, вследствие чего ротор двигателя не будет вращаться.
Использование асинхронных двигателей для привода вспомогательных машин э. п. с. обеспечивает значительные преимущества по сравнению с двигателями постоянного тока. При уменьшении напряжения в контактной сети частота вращения асинхронных двигателей, а следовательно, и подача компрессоров, вентиляторов, насосов практически не изменяются. В двигателях же постоянного тока частота вращения пропорциональна питающему напряжению, поэтому подача этих машин существенно уменьшается.
Электродвигателем параллельного возбуждения называется двигатель постоянного тока, обмотка возбуждения которого включена параллельно обмотке якоря (рис. 1). При снятии характеристик к цепи якоря подводится номинальное напряжение U н =const.
Рис. 1 — Схема двигателя параллельного возбуждения
Ток, потребляемый двигателем из сети, определяется суммой I=I a +I в, ток возбуждения обычно равен I в =(0,03...0,04) I н. Все характеристики двигателя снимаются при постоянных сопротивлениях в цепях возбуждения r в =const и якоря
Скоростная характеристика.
Зависимость n=f (I a) при U н =const и I в =const
Из уравнения ЭДС для электродвигателя
![]()
![]()
Как видно из выражения,частота вращения двигателя зависит от двух факторов — изменения тока нагрузки и потока. При увеличении тока нагрузки падение напряжения в сопротивлении цепи якоря увеличивается, а частота вращения двигателя уменьшается.
Поперечная реакция якоря размагничивает двигатель, т.е. с ростом тока I a уменьшается поток и, следовательно, увеличиваются обороты двигателя. Таким образом, оба фактора действуют в отношении оборотов машины встречно и вид скоростной характеристики будет определяется их результирующим действием.
На рис. 2 показаны три разные скоростные характеристики двигателя (кривые 1,2,3). Кривая 1 — скоростная характеристика при преобладании влияния I a ∑r,кривая 2 — оба фактора приблизительно уравновешиваются, кривая 3 — преобладает фактор размагничивающего действия реакции якоря.
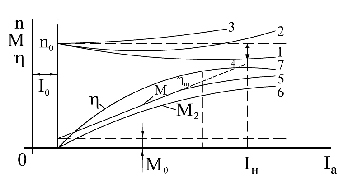
Рис. 2 — Характеристики двигателя параллельного возбуждения
Ввиду того, что в реальных двигателях изменение потока Ф незначительно, скоростная характеристика является практически прямой линией. На ряде современных машин параллельного возбуждения для компенсации влияния поперечной реакции якоря устанавливается дополнительная стабилизирующая обмотка возбуждения, которая полностью или частично компенсирует влияние реакции якоря.
Нормальной формой скоростной характеристики, при которой обеспечивается устойчивая работа двигателя, является характеристика вида кривой 1.
Наклон характеристики определяется величиной сопротивления цепи якоря Σr без учета реакции якоря. Когда добавочных сопротивлений в цепь якоря не включено, характеристика называется естественной. Естественная характеристика двигателя параллельного возбуждения достаточно жесткая. Обычно, где n o — частота вращения при холостом ходе. При включении в цепь якоря добавочных сопротивлений R рг, наклон характеристик увеличивается, они становятся «мягкими» и называются искусственными или реостатными.
Моментная характеристика – это зависимость М=f (I a) при r в =const, U=U н и Σr=const. В установившемся режиме работы двигателя согласно
имеем M эм = M 2 +M 0 = с м I a Ф. Если бы в процессе работы машины поток Ф не изменялся, то моментная характеристика представляла бы собой прямую (характеристика 4, рисунок 2). В действительности поток Ф с ростом тока I a несколько уменьшается из-за размагничивающего действия реакции якоря, поэтому моментная характеристика слегка наклонена вниз (кривая 5). Характеристика полезного момента располагается ниже кривой электромагнитного момента на величину момента холостого хода (кривая 6).
Характеристика КПД η=f (I a) снимается при U=U н, r в =const, Σr=const и имеет типичный для электродвигателей вид (характеристика 7 на рис. 2). КПД быстро растет при увеличении нагрузки от холостого хода до 0,25Р н, достигает максимального значения при Р=(0,5...0,75) Р н, а затем до Р=Р н остается почти неизменным. Обычно в двигателях малой мощности η=0,75...0,85, а в двигателях средней и большой мощности η=0,85...0,94.
Механическая характеристика представляет зависимость n=f (M) при U=U н, I в =const и Σr=const. Аналитическое выражение для механической характеристики можно получить из уравнения ЭДС электродвигателя
Определив ток I а из выражения М = с е I a Ф и подставив это значение тока в выражение выше, получим
![]()
Если пренебречь реакцией якоря и считать, что поток Ф не изменяется, то механические характеристики электродвигателя параллельного возбуждения можно представить в виде прямых (рис. 3), наклон которых зависит от величины сопротивления R рг включенного в цепь якоря. При R рг =0 характеристика называется естественной.
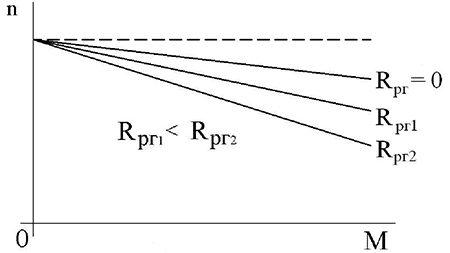
Рис. 3 — Механические характеристики двигателя параллельного возбуждения
Следует помнить, что при обрыве цепи возбуждения I в =0 обороты двигателя n→∞, т.е. двигатель идет «вразнос», поэтому его необходимо немедленно отключить от сети.
Классификация механических характеристик.
Рис. 1-1. Структура электропривода
Электроприводом называется машинное устройство, осуществляющее преобразование электрической энергии в механическую и обеспечивающее электрическое управление преобразованной механической энергией.
Электропривод состоит из двух основных частей:
1) силовой части, включающей электродвигатель и устройство для передачи механической энергии рабочему органу;
2) системы управления, содержащей командные органы, устройства для формирования свойств электропривода и защитные средства.
Основная функция электропривода - приводить в движение рабочий механизм. Однако современный автоматизированный электропривод выполняет более широкие функции по оптимизации технологического процесса.
Электроприводы, применяемые в производстве, можно разделить на три основных типа.
1)  Групповым электроприводом называется такой привод, в котором от одного электродвигателя с помощью одной или нескольких трансмиссий движение передается группе рабочих машин. Такой привод иногда называют трансмиссионным приводом.
Групповым электроприводом называется такой привод, в котором от одного электродвигателя с помощью одной или нескольких трансмиссий движение передается группе рабочих машин. Такой привод иногда называют трансмиссионным приводом.
Вследствие своего технического несовершенства этот тип привода в настоящее время почти не применяется и представляет интерес лишь с точки зрения истории развития электропривода, так как он уступил место одиночному и многодвигательному приводам.
2) 
 Одиночным электроприводом называется привод, который с помощью одного электродвигателя приводит в движение отдельную машину. Примерами применения одиночного электропривода являются одношпиндельный сверлильный станок, многочисленные электроинструменты, а также другие простые металлообрабатывающие станки и различные несложные механизмы. Во многих случаях привод осуществляется от электродвигателя специального исполнения, конструктивно представляющего одно целое с самим механизмом.
Одиночным электроприводом называется привод, который с помощью одного электродвигателя приводит в движение отдельную машину. Примерами применения одиночного электропривода являются одношпиндельный сверлильный станок, многочисленные электроинструменты, а также другие простые металлообрабатывающие станки и различные несложные механизмы. Во многих случаях привод осуществляется от электродвигателя специального исполнения, конструктивно представляющего одно целое с самим механизмом.
3) Многодвигательным электроприводом называется привод, состоящий из нескольких одиночных электроприводов, каждый из которых предназначен для приведения в действие отдельных рабочих элементов производственного агрегата. Такие электроприводы применяются, например, в сложных металлообрабатывающих станках, в бумагоделательных машинах, в металлургических прокатных станах и других машинных устройствах. Многодвигательные электроприводы получают все большее применение в современной промышленности.
Зависимость между скоростью вращения и моментом сопротивления механизма называется механической характеристикой механизма.
Для рассмотрения свойств механических характеристик можно воспользоваться упрощенной формулой, справедливой для большинства механизмов:
Исходя из этой формулы можно выделить четыре типа механических характеристик:
1) не зависящая от скорости механическая характеристика
![]() ,
,
2) линейно возрастающая механическая характеристика
3) нелинейно возрастающая характеристика (параболическая)
Вентиляторная характеристика,
4) нелинейно спадающая характеристика
Обратно пропорционален скорости.
Рис. 1-4. Основные типы механических характеристик.
Механической характеристикой электродвигателя называется зависимость его скорости от вращающего момента, т. е. .
 Почти все электродвигатели обладают тем свойством, что скорость их является убывающей функцией момента двигателя. Это относится почти ко всем обычным электродвигателям, применяемым в промышленности. Однако степень изменения скорости с изменением момента у разных двигателей различна и характеризуется так называемой жесткостью
их механических характеристик.
Почти все электродвигатели обладают тем свойством, что скорость их является убывающей функцией момента двигателя. Это относится почти ко всем обычным электродвигателям, применяемым в промышленности. Однако степень изменения скорости с изменением момента у разных двигателей различна и характеризуется так называемой жесткостью
их механических характеристик.
Механические характеристики электродвигателей можно разделить на три основные категории:
1. Абсолютно жесткая механическая характеристика, при которой скорость с изменением момента остается неизменной. Такой характеристикой обладают синхронные двигатели (прямая 1 на рис. 1-5).
 2. Жесткая механическая характеристика, при которой скорость с изменением момента хотя и уменьшается, но в малой степени. Жесткой механической характеристикой обладают двигатели постоянного тока независимого возбуждения, а также асинхронные двигатели в пределах рабочей части механической характеристики (кривая 2
на рис. 1-5). Для асинхронного двигателя степень жесткости в различных точках механической характеристики различна (рис. 1-6). Между наибольшими (критическими) значениями моментов в двигательном и генераторном режимах характеристика асинхронного двигателя оказывается сравнительно жесткой.
2. Жесткая механическая характеристика, при которой скорость с изменением момента хотя и уменьшается, но в малой степени. Жесткой механической характеристикой обладают двигатели постоянного тока независимого возбуждения, а также асинхронные двигатели в пределах рабочей части механической характеристики (кривая 2
на рис. 1-5). Для асинхронного двигателя степень жесткости в различных точках механической характеристики различна (рис. 1-6). Между наибольшими (критическими) значениями моментов в двигательном и генераторном режимах характеристика асинхронного двигателя оказывается сравнительно жесткой.
 3. Мягкая механическая характеристика отличается значительным изменением скорости с изменением момента. Такой характеристикой обладают двигатели последовательного возбуждения, особенно в зоне малых моментов (кривая 3
на рис. 1-5). Для этих двигателей степень жёсткости не остаётся постоянной для всех точек характеристики. Двигатели смешанного возбуждения могут быть отнесены ко второй или третьей группе в зависимости от степени жёсткости механической характеристики.
3. Мягкая механическая характеристика отличается значительным изменением скорости с изменением момента. Такой характеристикой обладают двигатели последовательного возбуждения, особенно в зоне малых моментов (кривая 3
на рис. 1-5). Для этих двигателей степень жёсткости не остаётся постоянной для всех точек характеристики. Двигатели смешанного возбуждения могут быть отнесены ко второй или третьей группе в зависимости от степени жёсткости механической характеристики.
Рис. 1-7. Схема включения двигателя постоянного тока
независимого возбуждения.
В установившемся режиме работы двигателя приложенное напряжение U определяется последующему выражению:
![]() (1.1)
(1.1)
где I я - ток якорной цепи, называется такая характеристика двигателя, которая получается при отсутствии внешних сопротивлений в якорной цепи и номинальных значениях напряжения и магнитного потока.
Если в цепь якоря двигателя включено дополнительное сопротивление (реостат), то механические характеристики, получаемые при этом, называются искусственными или реостатными .
Реостатные характеристики имеют значительно больший наклон к оси моментов, чем у естественной характеристики, т.е. обладают меньшей жёсткостью. Чем больше введённое в цепь якоря сопротивление, тем круче идёт характеристика, тем меньше её жёсткость.
Принципиальная схема электродвигателя смешанного возбуждения приведена на рис. 1. В этом двигателе имеются две обмотки возбуждения – параллельная (шунтовая, ШО), подключенная параллельно цепи якоря, и последовательная (сериесная,СО), подключенная последовательно цепи якоря. Эти обмотки по магнитному потоку могут быть включены согласно или встречно.
Рис. 1 — Схема электродвигателя смешанного возбуждения
При согласном включении обмоток возбуждения их МДС складываются и результирующий поток Ф примерно равен сумме потоков, создаваемых обеими обмотками. При встречном включении результирующий поток равен разности потоков параллельной и последовательной обмоток. В соответствии с этим, свойства и характеристики электродвигателя смешанного возбуждения зависят от способа включения обмоток и от соотношения их МДС.
Скоростная характеристика n=f (I a) при U=U н и I в =const (здесь I в — ток в параллельной обмотке).
С увеличением нагрузки результирующий магнитный поток при согласном включении обмоток возрастает, но в меньшей степени, чем у двигателя последовательного возбуждения, поэтому скоростная характеристика в этом случае оказывается более мягкой, чем у двигателя параллельного возбуждения, но более жесткой, чем у двигателя последовательного возбуждения.
Соотношение между МДС обмоток может меняться в широких пределах. Двигатели со слабой последовательной обмоткой имеют слабо падающую скоростную характеристику (кривая 1, рис. 2).
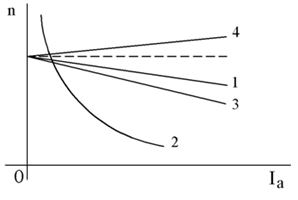
Рис. 2 — Скоростные характеристики двигателя смешанного возбуждения
Чем больше доля последовательной обмотки в создании МДС, тем ближе скоростная характеристика приближается к характеристике двигателя последовательного возбуждения. На рис.2 линия 3 изображает одну из промежуточных характеристик двигателя смешанного возбуждения и для сравнения дана характеристика двигателя последовательного возбуждения (кривая 2).
При встречном включении последовательной обмотки с увеличением нагрузки результирующий магнитный поток уменьшается, что приводит к увеличению скорости двигателя (кривая 4). При такой скоростной характеристике работа двигателя может оказаться неустойчивой, т.к. поток последовательной обмотки может значительно уменьшить результирующий магнитный поток. Поэтому двигатели со встречным включением обмоток не применяются.
Механическая характеристика n=f (М) при U=U н и I в =const. двигателя смешанного возбуждения показана на рис.3 (линия 2).
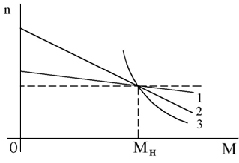
Рис. 3 — Механические характеристики двигателя смешанного возбуждения
Она располагается между механическими характеристиками двигателей параллельного (кривая 1) и последовательного (кривая 3) возбуждения. Подбирая соответствующим образом МДС обеих обмоток, можно получить электродвигатель с характеристикой, близкой к характеристике двигателя параллельного или последовательного возбуждения.